-
 儀表網手機版
儀表網手機版
手機訪問更快捷
 儀表網小程序
儀表網小程序
更多流量 更易傳播
-
 公眾號:ybzhan
公眾號:ybzhan
隨時掌握行業動態
 掃碼關注視頻號
掃碼關注視頻號
網絡課堂 行業直播

移動設備在技術方面變得越來越復雜,對液壓系統進行電子控制控制的需求也在隨之攀升。
電子元件的堅固和可靠性已經得到大幅提升,現在已經可以承受移動設備應用中的惡劣環境條件。
復雜的電子控制器通常只提供低能量控制信號。用于電磁驅動的液壓閥時,通常需要對控制信號進行放大。用于液壓設備的電子控制器通常都配有所需的放大功能。
為什么選用脈寬調制 PWM?
對閥的線圈施加電壓后,線圈中的電流會產生磁場,從而產生力使滑閥芯或錐閥芯移動。輸入電壓除以線圈電阻等于通過線圈的電流。用于開關閥時這一點非常明顯,但是對于比例閥而言,只有當通過改變輸入電流,可以準確地控制閥芯位置時才有用。
使用簡單的可變電阻可以改變電阻值,從而改變輸入電流。這種控制方法效率較低,而且不適于要求大電流的場合。同時,如果將連續變化的 DC 信號用于驅動比例型電磁閥,放大器的輸出晶體管將起到變阻器的作用。它可以將電源電壓降到電磁線圈在某個時刻要求的電壓值。線圈的滿電流可能達到幾個安培,需要流經輸出晶體管。結果晶體管就會發熱,因而需要大型散熱底座來散熱。
脈寬調制 (PWM) 是一種控制技術,可以克服上述問題。使用 PWM 時,輸出晶體管將用作開關,為電磁線圈提供一系列電壓恒定的開關脈沖。脈沖的頻率也是固定的,通常為 400~5000+ Hz。信號的大小可通過改變“開”脈沖相對于“關”脈沖的時間長短來確定。
這種技術的優點在于:在“關”脈沖期間,輸出晶體管中無電流通過;在“開”脈沖期間,晶體管兩端理論上沒有電壓降,因而產生的熱量也微乎其微。實際應用中,“開”脈沖期間晶體管兩端會有很小的電壓降,在開和關之間切換所需的時間也是確定的,因而會產生很少的熱量。但是,這部分熱量與傳統 DC 輸出信號產生的熱量相比簡直微不足道。
PWM 已經成了各種閥放大器的標準,以便減小放大器的體積和功率消耗。使用該技術時,無需對電磁閥進行改裝。使用 PWM 可以有效控制流向比例閥線圈的電流。使用 PWM 時,還可以通過電子方式進行電流調節、顫振、斜坡、短路保護以及去處死區。
PWM 的工作原理
PWM 信號不是恒定不變的,而是開啟一段時間,接著關閉一段時間(參見圖 1)。
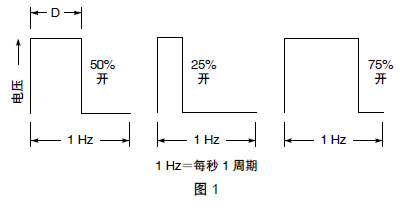
工作周期中的“D”指的是周期的“開”部分。工作周期可能位于 0(信號常閉)到 1(信號常開)中的任何位置。50%“D”將形成完整的方波。
PWM 信號的頻率可以很低 (100~400 Hz),也可以很高(高于 5000 Hz)。高頻 PWM 將產生更恒定的無波紋電流輸出,因而效果會更好。
線圈電感
電感是電路阻止電流啟停或變化的特征。電氣系統中的電感與機械系統中的慣性類似。電感將在工作周期的波形中產生時間延遲。理論上,波形應該是完整的矩形,有電流時即可上升,無電流時即可下降。由于電感的影響,實際上波形的上升和下降是逐漸的過程(參見圖 2)。

PWM 電流特性
外加 25% 的信號時,“D”比電流達到值所需的時間短(參見圖 3)。這就使得作用到閥線圈的電流輸出變小,進而導致閥的液壓輸出變小。如果 PWM 的頻率足夠低,在關期間電流將會降到零。這稱作“不連續電流”。

顫振(電流波紋)
粘連和磁滯可使液壓比例閥的行為異常而且無法預知。
如果輸入信號變化很小,粘連使得閥芯不能移動。當信號最終變得足夠強大,可以使閥芯移動時,閥芯又會超過精確控制要求的位置。
信號在上升或下降變化的過程中,即使控制信號的輸入值相同,閥芯的移動情況也會有所不同,這種特性稱作磁滯。
顫振指的是閥芯在期望位置的附近快速地小范圍移動。顫振使得閥芯不斷移動,從而避免了“粘連”,并且有抵消磁滯的作用。顫振的振幅應足夠大,頻率應足夠小,從而為閥芯留足響應時間。
顫振是由線圈中的電流“波紋”引起的—電流在所需的控制信號值附近波動。由于慣性的存在,與高頻波紋相比,閥芯可以更好地響應低頻波紋。波紋的振幅決定了閥芯在給定頻率的情況下可以移動的距離。
低頻 PWM
典型的低頻 PWM 小于 400 Hz,它會附帶地產生顫振(電流波紋)(參見圖 4)。PWM 的頻率足夠低,因而電流在下次上升前有衰減時間。顫振(波紋)的強度隨著線圈中平均電流的變化而變化。 顫振在 50% D 時達到,在 0% 和 100% D 時減為 0。因此,某些電流值產生的顫振會過大,而某些電流值產生的顫振卻不足。
當平均電流確定時,顫振電流的振幅是線圈電感和PWM頻率的函數。線圈的電感很大程度上是其額定電壓和功率的函數。與高功率線圈相比,低功率線圈的電感通常較大—因此在給定 PWM 頻率時附帶產生的顫振較少。
閥的設計不同,對相同的顫振頻率和振幅的響應也不同。雖然改變 PWM 的頻率可以調節顫振,但其振幅和頻率不能單獨調節,而只能根據不同閥的設計來設定。

高頻 PWM
當 PWM 的頻率足夠高(通常高于 5000 Hz)時,在各種實際應用中,線圈中的電流都是恒定的(參見圖 5)。高頻 PWM 不會附帶地產生顫振。

使用高頻 PWM 的優點在于可以單獨產生顫振,然后將其疊加到輸出電流之上(參見圖 6)。這樣,用戶就可以單獨控制電流,以及顫振的頻率和振幅。這樣的顫振可以在各個電流水平保持恒定,其頻率和振幅也可由用戶調節,從而使特定液壓閥的性能達到。

斜坡
斜坡用于減緩閥驅動器對輸入命令變化的響應。這樣,當命令輸入信號突然發生變化時,就可以有個平緩的過度。如果輸入信號的改變所需的時間比斜坡設定時間長,則斜坡將沒有效果。
斜坡可以是固定的或可調的,可以對稱或獨立,也可以是單斜坡或雙斜坡。可調斜坡的工作時間通常為 0 至 8秒,由電位器控制。單邊斜坡通常用于僅需要考慮加速的慢速切換控制。
對稱斜坡(參見圖 7)由單電位計控制,對上升和下降斜坡的調整也是相同的。

獨立斜坡(參見圖 8)的上升和下降邊分別配有電位計,加速和減速可以獨立設置。

雙線圈雙向閥的驅動器的每個線圈各有兩個獨立的斜坡,因此一共有四個獨立的控制斜坡(參見圖 9)。

增益或電流
放大器的增益指的是較大的輸出信號(至閥)與較小的控制輸入信號的比值。
增益=輸出信號÷輸入信號
增益通常由放大器上的分壓計調節。調節通常稱作“電流”調節,調節電流即可調節放大器的增益。通過這種方式,可以調節輸入信號達到時,放大器的輸出(對閥的設置進行控制)。
啟用/禁用
有些控制器/放大器含有“啟用”功能。這是一個用于確保安全的特性,在啟用連接后,只有電壓達到了特定的值,控制器的輸出才能開始工作。啟用選項可用于緊急停機開關或其他安全互鎖裝置。
雖然在電源處設置緊急停機開關是可行的,但我們不推薦這種操作,因為開關斷開后,電容器中存儲的電荷仍可使閥信號維持一段時間。
死區/最小電流
閥芯式比例閥通常有一定的閥芯重疊,從而產生死區。對于壓力和流量控制器,死區發生在閥芯開始移動時。對于方向閥而言,死區發生在中間位置。閥芯重疊減少了零位置時的泄漏,也為斷電或緊急停機提供了更大的安全性。閥芯重疊后,電磁線圈中的信號必須達到特定的最小強度,系統才會出現明顯的動作。
如果不需要該特性,通過設置控制器/放大器的最小電流(I-Min.),也可以去處壓力和流量控制器的死區。如果將最小電流調到零點以上,閥芯在上電后會即可跳躍至此位置,而不存在死區。
請注意:最小電流的設置會影響電流的設置,因此應首先設置最小電流。
如果使用多功能/雙電磁閥驅動器控制方向閥,通過撥碼開關來啟動死區消除功能。死區大小通常由工廠設定,視具體應用而定。
電流反饋
流過電磁線圈的電流會產生熱量。產生的熱量將使線圈的電阻增大。例如,如果線圈在 20℃ 的電阻為 7 歐姆,100℃ 時的電阻就可能達到 9 歐姆。電阻增大后,線圈功率將會變小,結果導致閥設置變低。
為了補償溫度帶來的變化,有些控制器/放大器配有“電流反饋”功能。在電路中為電磁線圈串連一個電流反饋電阻后,就可以使電磁線圈中的電流與輸入信號的電壓成比例,而與電磁線圈的電阻無關。電源電壓必須足夠大,以便克服增大的電阻。
免責聲明
客服熱線: 15267989561
加盟熱線: 15267989561
媒體合作: 0571-87759945
投訴熱線: 0571-87759942

下載儀表站APP

Ybzhan手機版

Ybzhan公眾號

Ybzhan小程序
 手機版
手機版 官方微信
官方微信

















 采購中心
采購中心
{kind=link}
{kind=link}
{kind=link}